关键词 |
遂宁川崎喷涂机器人,虎林川崎喷涂机器人,界首川崎喷涂机器人,登封川崎喷涂机器人 |
面向地区 |
全国 |
喷涂机器人(spray painting robot), 是可进行自动喷漆或喷涂其他涂料的工业机器人。喷涂机器人又叫喷漆机器人(spray painting robot), 是可进行自动喷漆或喷涂其他涂料的工业机器人,1969年由挪威Trallfa公司(后并入ABB集团)发明。喷漆机器人主要由机器人本体、计算机和相应的控制系统组成,液压驱动的喷漆机器人还包括液压油源,如油泵、油箱和电机等。
多采用5或6自由度关节式结构,手臂有较大的运动空间,并可做复杂的轨迹运动,其腕部一般有2~3个自由度,可灵活运动。较的喷漆机器人腕部采用柔性手腕,既可向各个方向弯曲,又可转动,其动作类似人的手腕,能方便地通过较小的孔伸入工件内部,喷涂其内表面。喷漆机器人一般采用液压驱动,具有动作速度快、防爆性能好等特点,可通过手把手示教或点位示数来实现示教。喷漆机器人广泛用于汽车、仪表、电器、搪瓷等工艺生产部门。
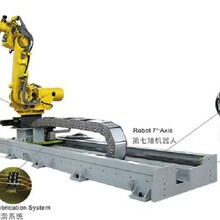
机器人手臂可承受的大荷载。对于不同的喷涂场合,喷涂(涂胶或喷漆)过程中配置的喷具不同,则要求机器人手臂的大承载载荷也不同。喷涂轨迹指在喷涂过程中喷枪运行的顺序和行程,采用喷涂机器人可模仿熟练喷漆工的喷涂轨迹。日本某汽车公司采用往复式自动静电喷涂机和喷涂机器人喷涂轿车车身。
涂装效率是喷涂作业效率,包含单位时间的喷涂面积、涂料和喷涂面积的有效利用率。涂着效率是喷涂过程中涂着在被涂物上的涂料量与实际喷出涂料总量之比值,或被涂物面上的实测厚膜与由喷出涂料量计算的涂膜厚度之比,也就是涂料的传输效率(transfer efficency 简称TE)或涂料利用率。涂装有效率是指实际喷涂被涂物的表面积与喷枪运行的覆盖面积之比;为使被涂物的边断部位的涂膜完整,一般喷枪运行的覆盖面积应大于被涂物的面积。
旋杯的过高转速除引起过喷外,还会导致透平轴承的过量磨损,增加清晰用压缩空气的消耗和降低涂膜所含溶剂量。佳的旋杯转速可按所用涂料的流率特性而定,因而对于表面张力大的水性涂料、高黏度的双组分涂料的旋杯转速比普通溶剂型涂料的要高。
涂料流率高会形成波纹状的涂膜,同事当涂料流量过大使旋杯过载时,旋杯边缘的涂膜增厚至一定程度,导致旋杯上的沟槽纹路不能使涂料分流,并出现层状漆皮,这会产生气泡或涂料滴大小不均匀的不良现象。每支喷枪的大涂料流率与高速旋杯的口径、转速涂料的密度有关,其上限由雾化的细度和静电涂装的效果来决定。实践经验表明,涂料应在恒定的速度下输入,在小范围内的波动不会影响涂膜质量。