


关键词 |
圣瑞思,弧焊机器人 |
面向地区 |
全国 |
协调控制技术:控制多机器人及变位机协调运动,既能保持焊枪和工件的相对姿态以满足焊接工艺的要求,又能避免焊枪和工件的碰撞。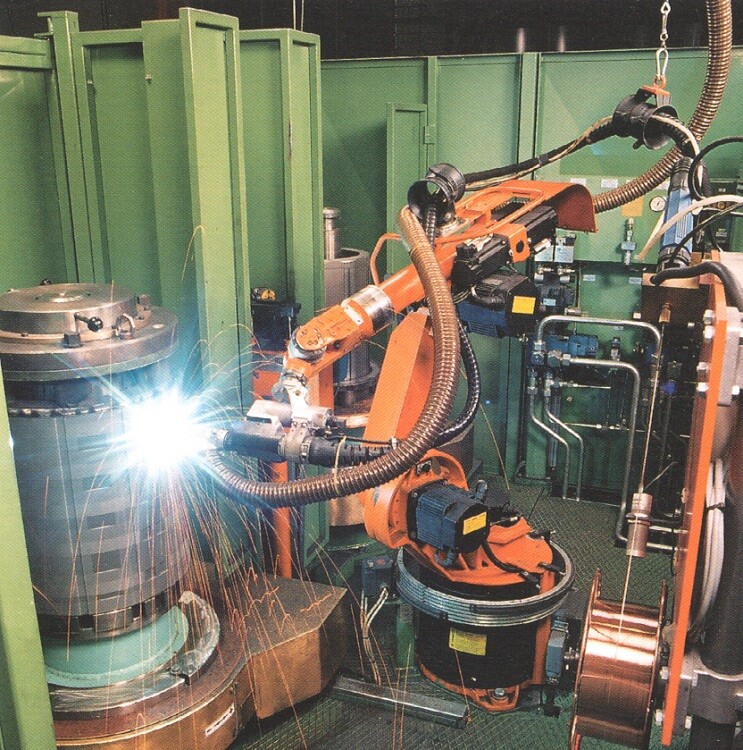
焊缝轨迹跟踪技术:结合激光传感器和视觉传感器离线工作方式的优点,采用激光传感器实现焊接过程中的焊缝跟踪。
提升焊接机器人对复杂工件进行焊接的柔性和适应性,结合视觉传感器离线观察获得焊缝跟踪的残余偏差,基于偏差统计获得补偿数据并进行机器人运动轨迹的修正,在各种工况下都能获得佳的焊接质量。
具有可长期进行焊接作业、焊接作业的高生产率、和高稳定性等特点。随着技术的发展,弧焊机器人人正向着智能化的方向发展。
弧焊机器人系统基本组成如下:机器人本体、控制系统、示教器、焊接电源、焊枪、焊接夹具、安全防护设施。弧焊机器人系统组成还可根据焊接方法的不同以及具体待焊工件焊接工艺要求的不同等情况。
机器人控制系统是机器人的大脑,是决定机器人功能和性能的主要因素。工业机器人控制技术水平。生产销售。






